Question: Is there a solution that provides interactive visualizations to explore live or recorded data from robotics frameworks like ROS?
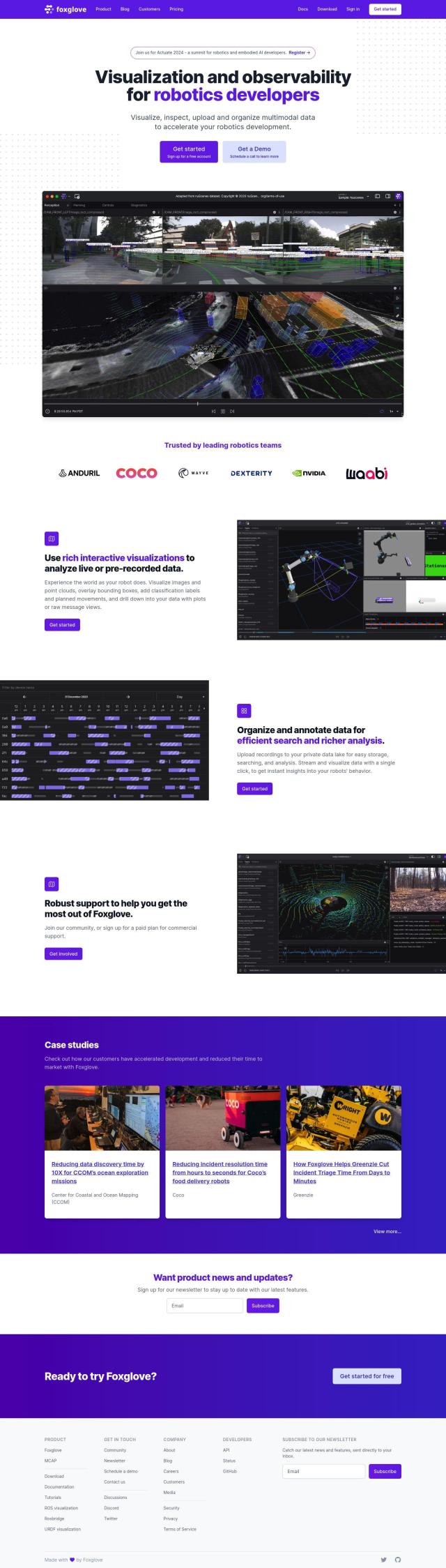
Foxglove
If you need a tool that offers interactive visualizations to explore live or recorded data from robotics frameworks like ROS, Foxglove is a good choice. It's a multimodal data visualization and organization tool to speed up robotics development. Foxglove offers detailed interactive visualizations to explore live or recorded data from ROS 1 and ROS 2, and it supports a variety of file formats, including MCAP. The tool includes a variety of panels for inspecting data, including 3D, diagnostics, image, plot, publish, raw messages and state transitions, and you can arrange them in a custom layout to best analyze data and interact with 3D robot models.

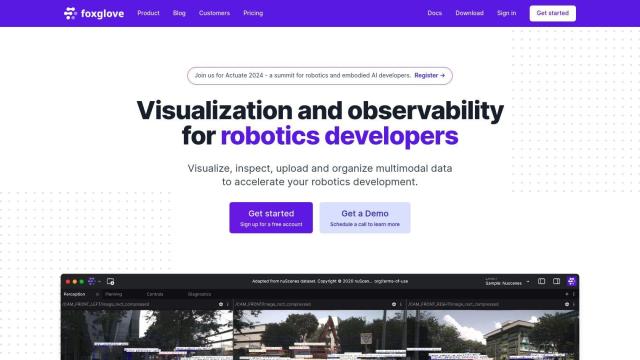
Rerun
Another tool worth checking out is Rerun, an open-source SDK that lets you log and visualize computer vision and robotics data in real time. Rerun is a time-series database and visualization engine that lets you validate, debug and explain how a system works and what data it's producing with a minimum of code. It can handle high-performance interactive 2D/3D visualization and can be used with C++, Python or Rust projects, so it's a good choice for processing complex data streams in robotics and other domains.
Roboto
If you prefer a more data management-oriented approach, check out Roboto. This data engine is designed to ingest log data from robots, drones and other sources so you can process and search it at large scale. Roboto offers filtering, downsampling and processing of raw data, and AI-powered search and natural language query. It stores data in the cloud with tagging and metadata for fast access, and it's designed to handle large amounts of data.