Question: I'm looking for a tool that helps me visualize and analyze multimodal data for robotics development.

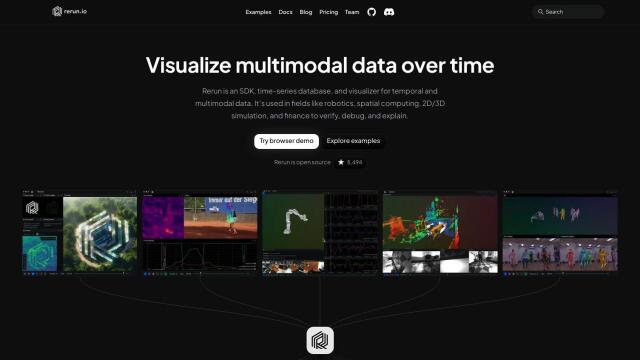
Rerun
If you want a tool to visualize and analyze multimodal data for robotics development, Rerun is a great option. It comes with a software development kit (SDK) that lets you log and visualize real-time computer vision and robotics data with a time-series database and visualization engine. Rerun supports multimodal data (tensors, point clouds, text) and has high-performance interactive 2D/3D visualization. It's extensible and can be integrated with C++, Python, or Rust projects, so it's a good option for complex data streams in robotics and other domains.
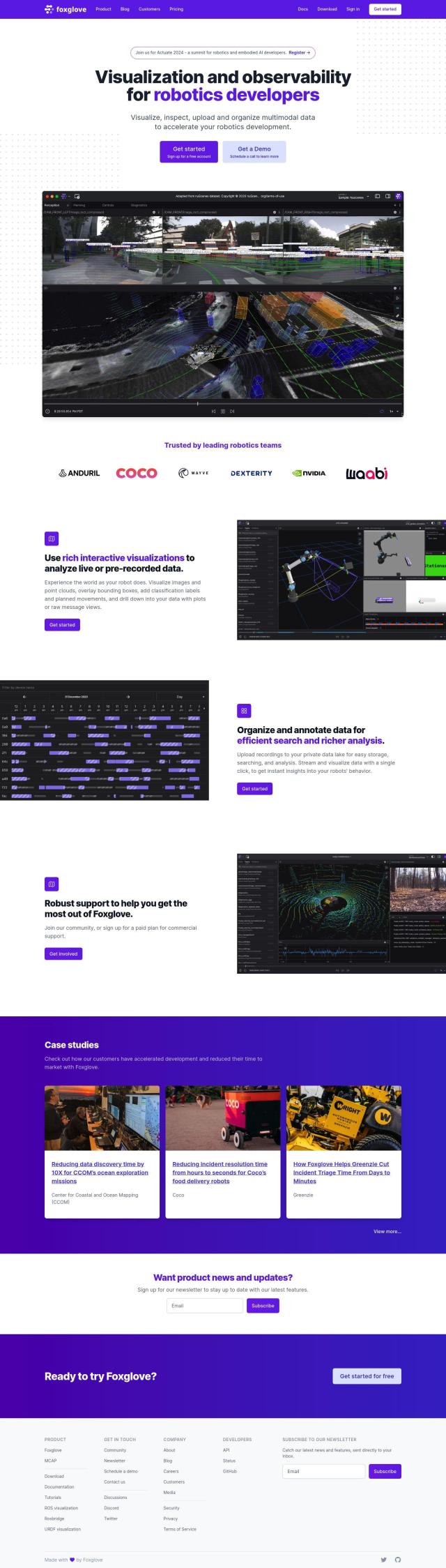
Foxglove
Another option is Foxglove, a multimodal data visualization and organization tool tailored for robotics development. It supports several robotics frameworks, including ROS 1 and ROS 2, and has rich interactive visualizations for exploring live or recorded data. Foxglove has a variety of panels for inspecting data, including 3D, diagnostics, image, and plot views. It also has a private data lake for storing and analyzing recordings.
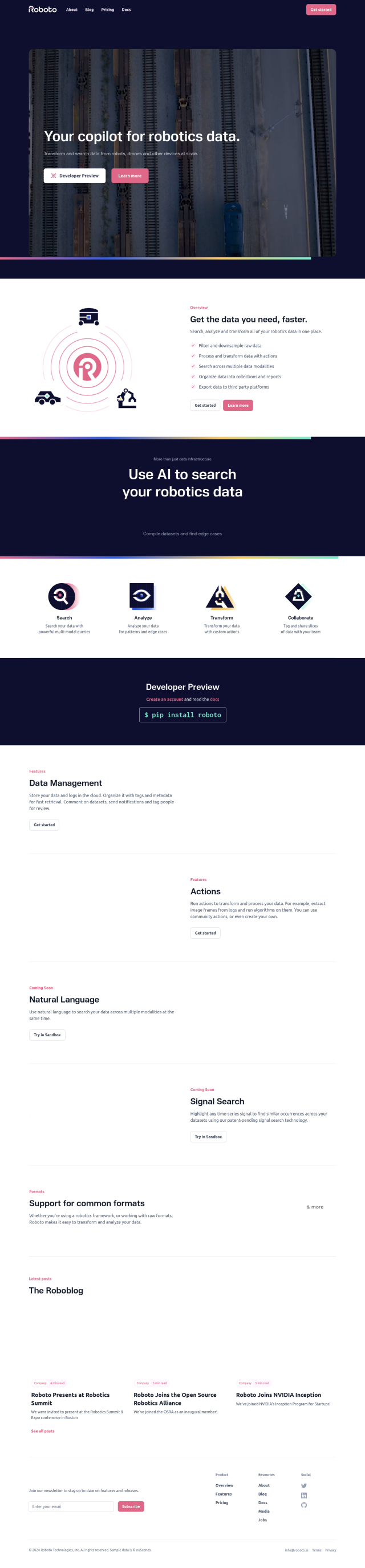
Roboto
For those who need more sophisticated data management and search, Roboto has a powerful data engine for ingesting log data from robots and other sources. It has AI-powered search, natural language search, signal search technology and cloud-based data storage. Roboto supports common formats from robotics frameworks and has multi-user support for collaborative data management, so it's a good option for managing and analyzing large amounts of data in robotics.


Jina
Last, Jina is a collection of tools to boost search abilities on multimodal data. It includes multimodal and bilingual embeddings, rerankers, LLM-readers and prompt optimizers. Jina supports more than 100 languages and has open-source projects for managing multimodal data structures and serving large multimodal models. That makes Jina useful for optimizing search and retrieval of multimodal data in robotics and other domains.